Spanner
Spanner 的前世今生
当时Google的数据库系统
- BigTable:缺乏对复杂schema和强一致性的支持 (其实也是有需求才有Spanner)
- Megastore:性能不好
Spanner是一个:高隔离,强一致(能在全球数据中心做到强一致,却又不损失太多可用性,这是如何做到的?),半结构化的分布式数据库
影响了之后的数据库设计:CockroachDB (为什么叫蟑螂?我觉得应该是想要这个DB像小强一样顽强,高性能,话说国外也有打不死的小强这个俚语吗?哈哈) CockroachDB是由一群曾经参加过 Google BigTable,Spanner 工作的工程师开发的,所以说其设计受Spanner的影响比较大。
Spanner
Spanner论文中的Abstract部分大概提到了它的一些特点,比如说在全球范围能够分布式事务(意味着支持ACID)支持(第一个能够完成如此大规模任务的系统),外部(external consistent)一致性,高精度时钟(GPS+原子钟),高性能事务处理(乐观的并发控制)。
Q1:什么样的schema可以认为是复杂的schema?
A1: 相对于BigTable来说,BigTable跟关系型数据库不同,对数据的限制少,比较松散。Spanner 是OLTP的系统。
总结一下Abstract里的特点就是
- SQL数据库,ACID支持,尤其是对最高隔离级别可串行化的支持(serializability)的支持
- CAP系统:对几乎最高级别一致性—-外部一致性的支持
- 水平伸缩性:数据分片并支持分布式事务处理(满足跨Shard的事务处理,序列化和强一致)
- 高性:只读事务的非阻塞实现(效果:Google的客户F1约99%的只读事务)
Spanner’s Transaction
` Spanner如何在全球范围内完成最严格,最理想化的事务的支持?`
使用的技术是比较成熟的技术
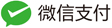
第一个是两阶段提交 2PC
首先两阶段提交是为了解决分布式事务这个问题的, 所谓分布式事务就是说有一个事务,它可能需要修改的东西涉及在不同的节点,在这种情况下需要遵循一定的协议,才能保证这个事务ACID的性质。
2PC工作流程:
第一阶段(Request-to-Prepare和Prepared)(提交请求阶段),在此阶段会选出一个Coordinator(协调者),Coordinator会去问这些参与的节点 “我想要修改你们节点里的这些数据,你们能不能完成?” ,一个比较理想的情况就是所有节点都回复说可以,那么这些资源在后续会被锁起来,以备提交。如果说其中有任何一个参与的节点说 “我做不到”,那整个Transaction就要Abort。
第二阶段(Commit,Done)(提交执行阶段) 假如所有的节点都没有问题,那么Coordinator会让它们Commit,它们做完了会回复Coordinator一个Done,那么整个Transaction就结束了。如果万一在这些过程中出现了一些问题,这个Transaction最后都不会被执行,比如说一个节点无论它在第一阶段说不行,还是在第二阶段失败了,那么这整个分布式的Transaction都需要Abort或者Rollback。
一般的分布式事务都会遵循这个协议,但是这个协议对于错误过于敏感(单点故障)。一个非常严重的问题就是,有一个节点在第一阶段承诺可以做这件事,但是在第二阶段它失联了(也就意味着Coordinator即不知道它做没做,也不知道它到底是失败了),这个时候整个系统就陷入一种阻塞的状态。
其它系统针对这个问题的改进方式:
- 引入超时机制
- 3PC
Spanner采取的改进

Spanner采用了Paxos,通过将几个Replica组成一个Paxos Group,来解决这样的一个单点故障,3 副本可以容忍有一个节点挂掉,然后整个系统仍然能够对外交流。但是它提高了系统的通信开销,以前2PC只需要跟Coordinator通信,但是现在需要让节点之间达成共识,这也算是一种tradeoff吧,用一定的延迟换取了可用性。
数据库的隔离级别(ACID)
A:一个事务要么做完,要么回滚,不能出现中间状态
C:在单机版的系统上没有什么特殊含义
I:事务之间并发执行,但不能相互影响
D:事务一旦提交,无论发生什么事情,最后都能恢复过来(WAL)。
Spanner的厉害之处就在于其以高效的方式实现了很强的隔离级别。
隔离级别:并发事务的中间结果何时,以何种方式对其它事务可见
好的隔离级别:并发执行的事务得到的结果与串行执行的预期一样.
数据库隔离级别(由低到高)
- 读未提交 (能读到其它事务未提交的数据,一个但凡正常点的系统都不允许出现这种情况)
- 读已提交
- 可重复读 (在同一个事务中读两次,读到的数据是否一致) (但是可重复读会发生幻读,结果条目数量问题)
- 可序列化 (实现方式 悲观/乐观 并发控制)
一般情况实现可串行化的方法 2PL 快照隔离
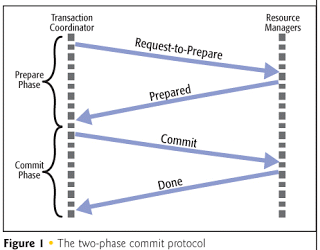
两阶段锁 2PL(悲观并发控制)
两阶段
- 锁增长阶段,第一阶段只能申请锁,不可释放锁
- 锁收缩阶段,第二阶段只能释放锁,不可申请锁
每个事务执行前要先获取锁
- 读操作会阻塞写操作
- 写操作会阻塞读操作
- 写操作会阻塞写操作
那么代价是什么呢? 一旦涉及到锁,那么性能就不会好,因为有东西会被阻塞。
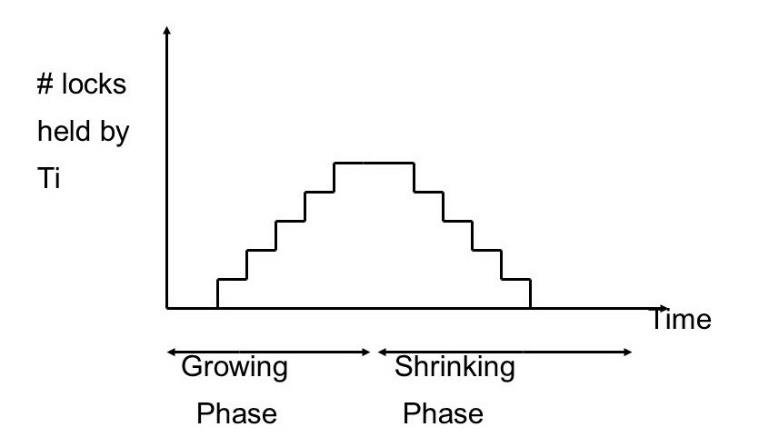
快照隔离(Snapshot isolation)(乐观并发控制里有代表性的)
快照隔离的思想就是数据库会保存数据的不同版本
本图来自DDIA
可以看到每条数据都有版本号(created by ,deleted by = nil 代表目前没有被删除),一个事务看到的可能是另一个事务在修改之前的版本,所以说它读的不是最新的数据,它读的可以是历史上的版本,也就是所谓的Snapshot。通过这样的方式也完成了事务之间的隔离,有种读写分离的感觉。
快照隔离在原始版本上由很多的变种,最朴素的快照隔离其强于可重复读,略弱于可串行化,但稍加改进可达到可串行化。
Spanner的混合并发控制
Spanner将两个乐观与悲观的并发控制方式结合了起来。对于既有读和写的事务里使用悲观的并发控制(2PL),乐观的并发控制只用在只读的事务上。
Spanner 如何保证一致性
Spanner 遵循严格的时间顺序的强一致性。
要实现强一致,首先需要定义一个顺序,要定义顺序的话,首先需要定义一个版本。
只读事务(RO)的版本是其开始的时间
读写事务(RW)的版本是commit的时间
首先我们先假设时钟非常的精确(但是这个显然不可能,在分布式系统中,不同节点上的时钟由时间漂移,同步时间的话还会有延迟),我们先假设有这么一个精确的时钟,后面再看Spanner是如何做到的。
不精确的时钟+耐心=精确的时钟
生活中的时钟都是不精确的(大多数系统都是最终一致性)
但是我们认为,等待一段时间后,我们写的数据应该能在所有副本上读到。
Spanner时钟黑科技,设计真正的亮点:GPS+原子钟 (这套技术即使开源了,别的公司也不一定能够复现,这套技术需要很强大的全球物理网络作为支撑)
在每一个数据中心里都放了一个原子钟,用全程直连光纤连接各个DC,然后通过GPS来定期校准,这样就能保证每个数据中心的时钟都是精确的。通过这个黑科技Google可以把误差控制在几个ms之内,平均大概4个ms
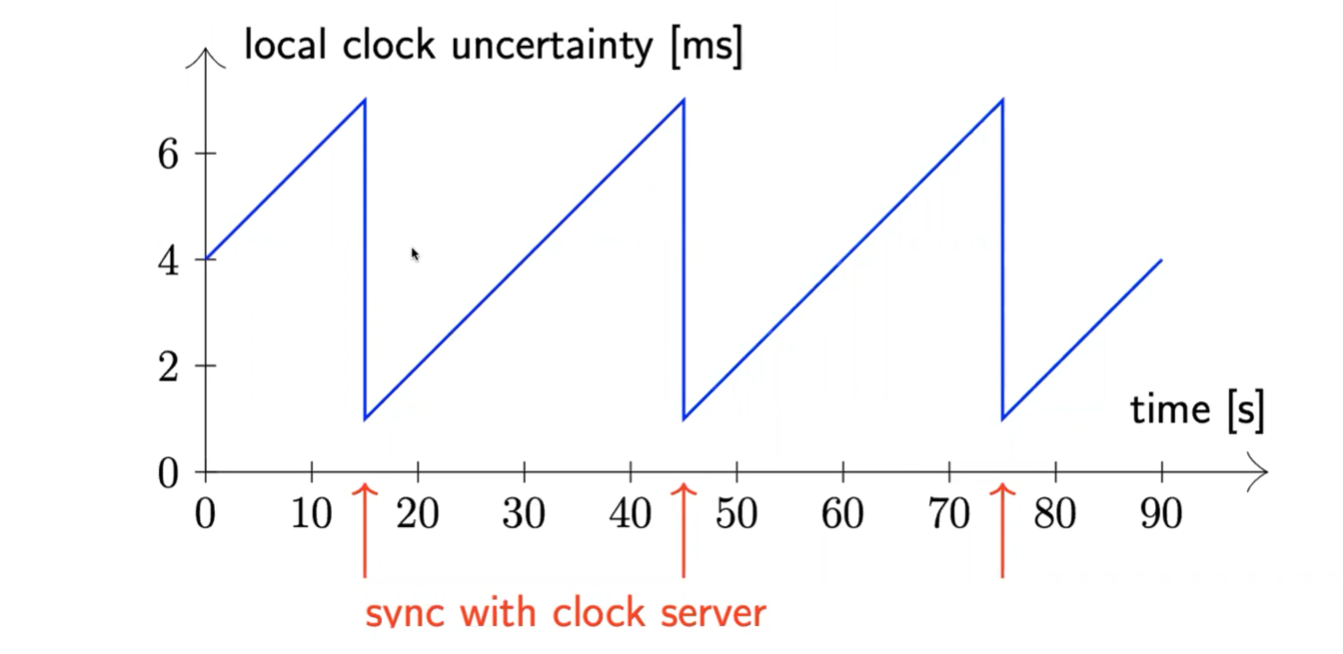
对于每一个时间戳,都会有一个绝对的置信区间(100%置信)(区间长度若干毫秒)
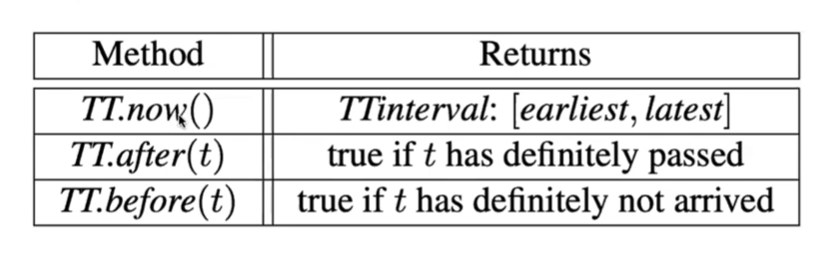
PS:TrueTime Api 不提供开源。因此在Spanner的开源实现中,选取了稍弱的方式来实现TrueTime 也就是now()方法提供的并不是时间点,而是一个时间段,在这个时刻最早可能是什么,最晚可能是什么,这个范围很小,在17年这个区间跨度为4ms。
读写事务的版本可以是 可提交时刻的latest timestamp,等待该时间确定过去,才会释放锁
只读事务的版本是 开始时刻的latest timestamp
举个栗子
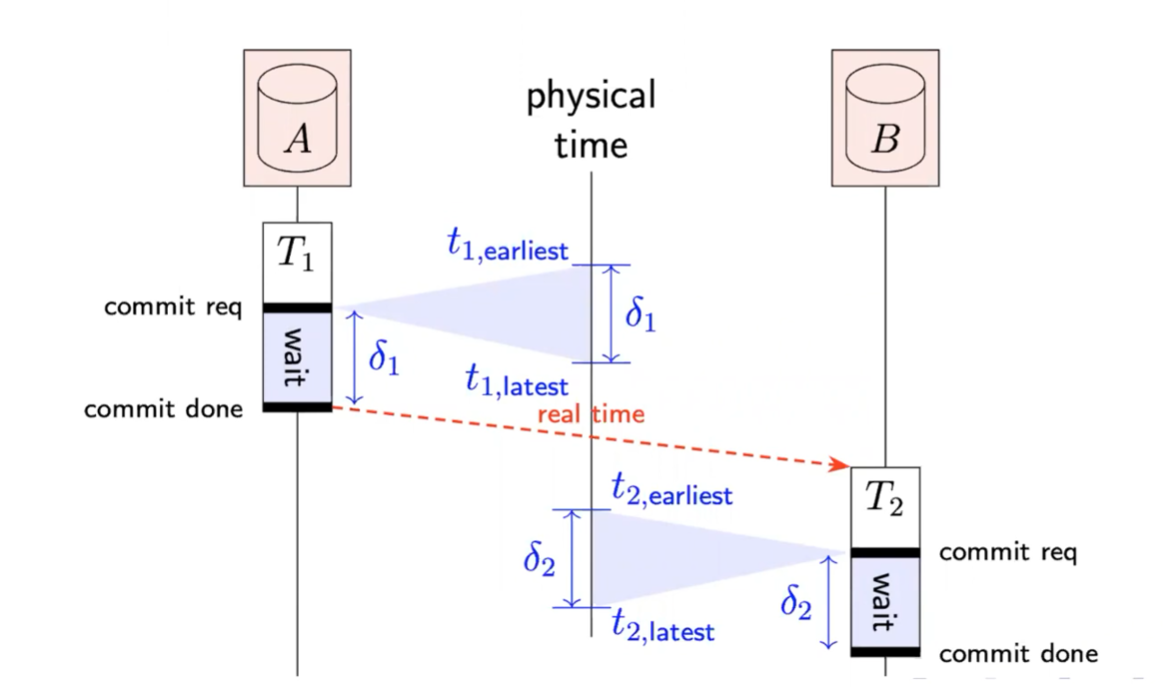
事务T1在commit req阶段已经做完了,但其仍然要wait到它拿到的时间段最后才可以commit done(也就意味着2PL的锁才可以释放)。然后T2才可以开始做,T2之前是由T1的锁挡住了,其后续仍然要重复T1的过程。
以上过程就能一定保证之后执行的事务的版本号要比之前执行的事务的版本号要高,从而保证了线性一致性。这对于系统运行的正确性非常重要。
当然,可以看到两个事务都有wait时间,这就是这种方案的代价。但是这种代价远远小于Paxos公式的代价。
Spanner通过这种方法,能够在不精确的时钟上,依然能够保证是强一致的。此外还能够保证只读的事务不需要锁。
大多数内容来自System meetup学习记录,供复习之用